

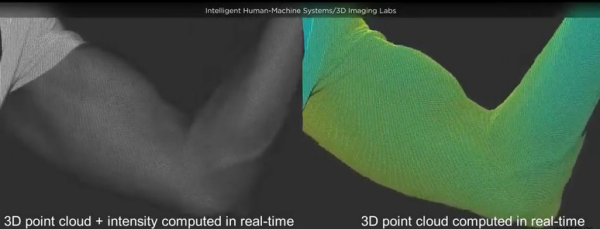
Click image for real-time 3D scanning technology developed in our lab
Click image for real-time
3D scanning technology developed in our lab
Jonathan Kofman, Ph.D., P.Eng, ing.(OIQ)
Ph.D. (Western),
M.A.Sc. (Ecole Polytechnique, Montréal),
B.Eng. (McGill)
Dr. Kofman's research is in the areas of biomechanics and biomedical device/system design; 3D imaging, 3D computer vision, and 3D-vision sensor-design; and human-robot interfaces and human-robot interaction. His research has led to commercial laser-camera scanners and CAD/CAM systems used worldwide in prosthetics; a patented 3D scanning invention (for application in hand-held 3D scanners and 3D robot-vision scanners) that was transferred to industry in the field of medical devices and life sciences; a patent for an articulating joint for human-assistive devices and robotic applications; and patents for full-field optical/vision-based 3D surface-shape measurement. Dr. Kofman has been co-recipient and co-author of several research-paper/research awards, and was the first to be awarded the En-Hui Yang Engineering Research Innovation Award at the Faculty of Engineering, University of Waterloo.
Overview
Increasing demands on intelligent systems to operate in highly complex and unstructured dynamic environments, where objects are unfamiliar, hazardous, or have unknown and uncertain behaviour, require new developments in the acquisition and fusion of perceptual information from sensors, as well as processing for recognition, interpretation and learning. To augment the capabilities of intelligent systems, the ability of humans to perceive, recognize, understand and reason can be utilized through human-machine interfaces. The ability of machines to perform highly dexterous and repetitive tasks and to acquire and process large amounts of information from various types of sensors can likewise be used to extend the capabilities of humans. The Intelligent Human-Machine Systems / 3D Imaging Laboratories are engaged in research that combines the use of perceptual information from sensors, artificial intelligence, and human perception and reasoning in intelligent systems.
Biomedical Systems and Biomechatronics (research interests)
- wearable sensors
- artificial intelligence (AI) / machine learning applied to biomedical signal processing
- wearable intelligent assistive robotic/orthotic systems, robotic exoskeletons
- aging, technology for older adults/elderly
- brain-computer interfaces (BCI)
- intelligent prosthetic and orthotic system design
- human assistive device design
- biomechanics, human gait stability, rehabilitation
- design of biomedical sensors/systems
- human-assistive/service robots
- 3D body surface measurement
3D Imaging (research interests)
- 3D imaging, 3D scanning
- 3D computer vision
- vision-based 3D surface measurement
- optical system design,
phase-shifting / fringe-projection 3D surface measurement systems, optical metrology
- real-time full-field 3D imaging sensors / real-time full-field 3D surface measurement systems
- range-image registration
- range-sensing,
range-sensor design
-
hand-held 3D imaging sensors / hand-held 3D surface measurement systems
- vision-based robot control,
vision-based human-robot interfaces
Robotics (research interests)
- artificial intelligence (AI) / machine learning applied to intelligent robotic systems
- robotic exoskeletons
- human-guided robot learning, task learning, object grasping and manipulation
- human-assistive/service robots
- human-robot interfaces,
human-robot interaction, brain-robot-interfaces
- robot vision, vision-based robot control (visual servoing)
-
robot teleoperation
* Graduate Studies in these areas *
Research at the Intelligent Human-Machine Systems / 3D Imaging Laboratories includes design and development of new sensors, fusion of sensory information, human-machine interfaces for intelligent systems, and intelligent human-assistive systems. Three main areas of research are in biomedical systems and biomechatronics; 3D imaging / optomechatronics; and robotics. The research is highly multidisciplinary and typically involves a combination of these (for example: vision-based human-robot interface; image guided robot end-effector positioning (visual servoing), semi-autonomous traded and shared robot control; multi-sensory (visual, auditory and haptic) feedback systems, wearable intelligent human-assistive robotic/orthotic systems.
Ongoing biomedical research includes design of new wearable AI-based human-assistive systems for people with gait disorders, and dynamic gait stability classification and prediction models based on wearable sensors and AI biomedical signal processing. Recent research in biomechatronic systems and human-assistive system design in collaboration with the Ottawa Hospital Research Institute, Ottawa, has led to development of measurement and analysis systems for assessing dynamic gait stability and fall risk in older adults and high fall-risk populations based on wearable sensors, dynamic stability and fall-risk modelling, and artificial intelligence (AI) / machine learning applied to biomedical signal processing. New orthotic designs include electromechanical and hydraulic Stance-Control Knee-Ankle-Foot Orthosis (SCKAFO) systems. One patent has been issued related to this biomedical research.
Dr. Kofman's research in three-dimensional (3D) surface measurement systems / 3D imaging led to one of the first commercial 3D scanners in the field of prosthetics, part of the first CAD/CAM system for prosthetics that included residual-limb shape sensing, CAD shape modification, and prosthetic-socket mould machining by a numerically-controlled (NC) milling machine. Since commercialization in 1991, the system has been used worldwide. Recent 3D computer vision and 3D surface measurement / 3D imaging research has led to new techniques for hand-held and robotic 3D imaging sensors, adaptive 3D imaging, and real-time full-field 3D shape measurement (real-time 3D scanning, 3D video), using fringe-projection and phase-shifting techniques. Two patents were issued related to this 3D computer vision and 3D imaging /optomechatronics research, with one transferred to industry in the field of medical devices and life sciences.
 Click
image for video
Click
image for video
Research in vision-based robot teleoperation has enabled a robot manipulator to be controlled by tracking the hand motion of the human operator to allow natural means of communication of tasks to the robot. This has been achieved by vision-based tracking using markers and by markerless vision based tracking of the human operator, with task completion using shared and traded control. Other research includes artificial intelligence (AI) applied to intelligent robotic systems for dexterous tasks.