Updates and Progress
Stay tuned to this section for the latest updates related to our project! This section will be periodically updated before the Symposium date.
A Few Fun Runs!
March 10, 2014
After finishing the board, we decided to go cornering indoors. Sweet!
It's Alive!!!
March 03, 2014
After the board was put together, it took a lot of programming and troubleshooting. At last, we have a test run of it!
Here is a video of it in action (it can definitely go faster, by the way):
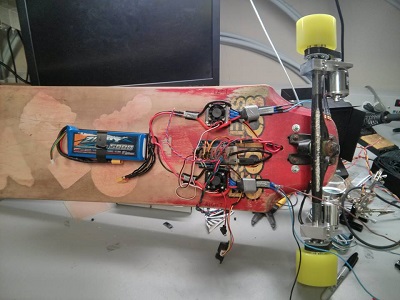
Wiring and Tangles
March 02, 2014
Wiring is pretty close to being finished. Will need to organize these better.
Putting It Together Now...
February 25, 2014
After securing the handle and the motor mounts on, it looks like they are not aligned. Looks like we will have to chamfer those edges and make a few modifications. Good thing we have some time alloted to trial and error! Also to be done, the electronics.

Handle Electronics
February 21, 2014
It turns out that a lever switch on the end is more ergonomic. Feels fairly natural to hold down both with thumb and index finger. It should work with longer fingers/bigger hands. As a bonus, unscrew and flip the lever switch and handle to make it left-hand compatible.

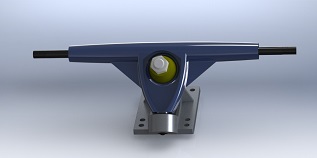
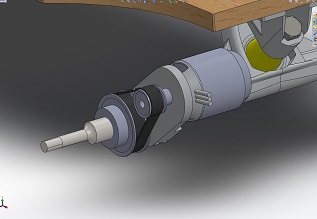
A Bit of Motor Testing
February 13, 2014
We briefly mounted the motor on the board to see how well it spins. Quick video demo:
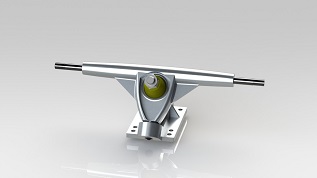
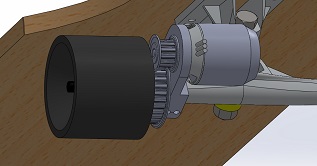
Drive System!
February 11, 2014
Drive system all done!


Extenders Done, Starting Motor Mounts...
January 28, 2014
Extenders are finally complete. It took a long time to machine all that stainless steel. Here is a preview of the motor mounts:

Handle Mechanical Complete
January 16, 2014
The handle used for training mode is complete! It is made of aluminium extrudes, making it fairly light. The holes along the shaft make it height adjustable. Now to put the electronics sometime...