


Existing walkers do not have any electronics system built into it.
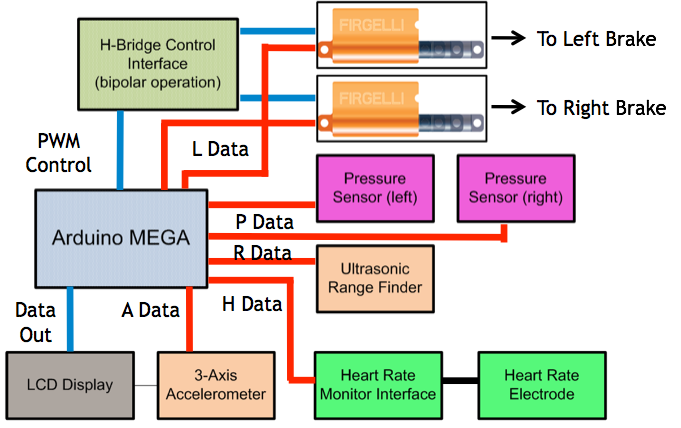
The figure below shows the low level overview of all the sub-systems used in this walker.
Existing walkers do not have any electronics system built into it.
The figure above shows the low level overview of all the sub-systems used in this walker.
-
*Proportional Brake Control System
Linear Actuators require bipolar control
Relatively high driving current rating
Apply position control to achieve proportional braking
-
*Dynamic Measurement System
Accelerometer collects X, Y, Z acceleration data
Ultrasonic Range Finder collects distance between user and walker
Provides secondary input to braking control
-
*Heart Rate Monitor System
The Heart Rate Monitor consists of 2 electrodes that detects the electrical impulse from the skin
This impulse is transmitted as radio waves to the Heart Rate Monitor Interface
Heart Rate Monitor Interface converts these impulses into Beats per minute (BPM)
Data transmitted to microcontroller to control the brakes