MTE 380: Autonomous Boat Project
This project is a major component of the mechatronics design course, MTE 380. The objective of this project is to make an autonomous boat, a boat which can steer and drive itself, that is able to race around the edges of a pool but without touching the walls. The boat must be no more that 10" x 10" x 10" but after that pretty much anything else is fair game. Here is what the winning group from last years race looked like.
Update 2: Feb 21, 2014
The hull has been finished! Check out the bottom of Update 1 for the pictures! Now onto coating...
We had a really tough time picking a coating for the boat, trying to balance price and the reliability. We settled on using Leak Seal which is a rubber coating that is definitely waterproof but doesn't go on too thick.


Most recently we drilled the hole for the shaft and glued in the tube to secure the drive shaft.
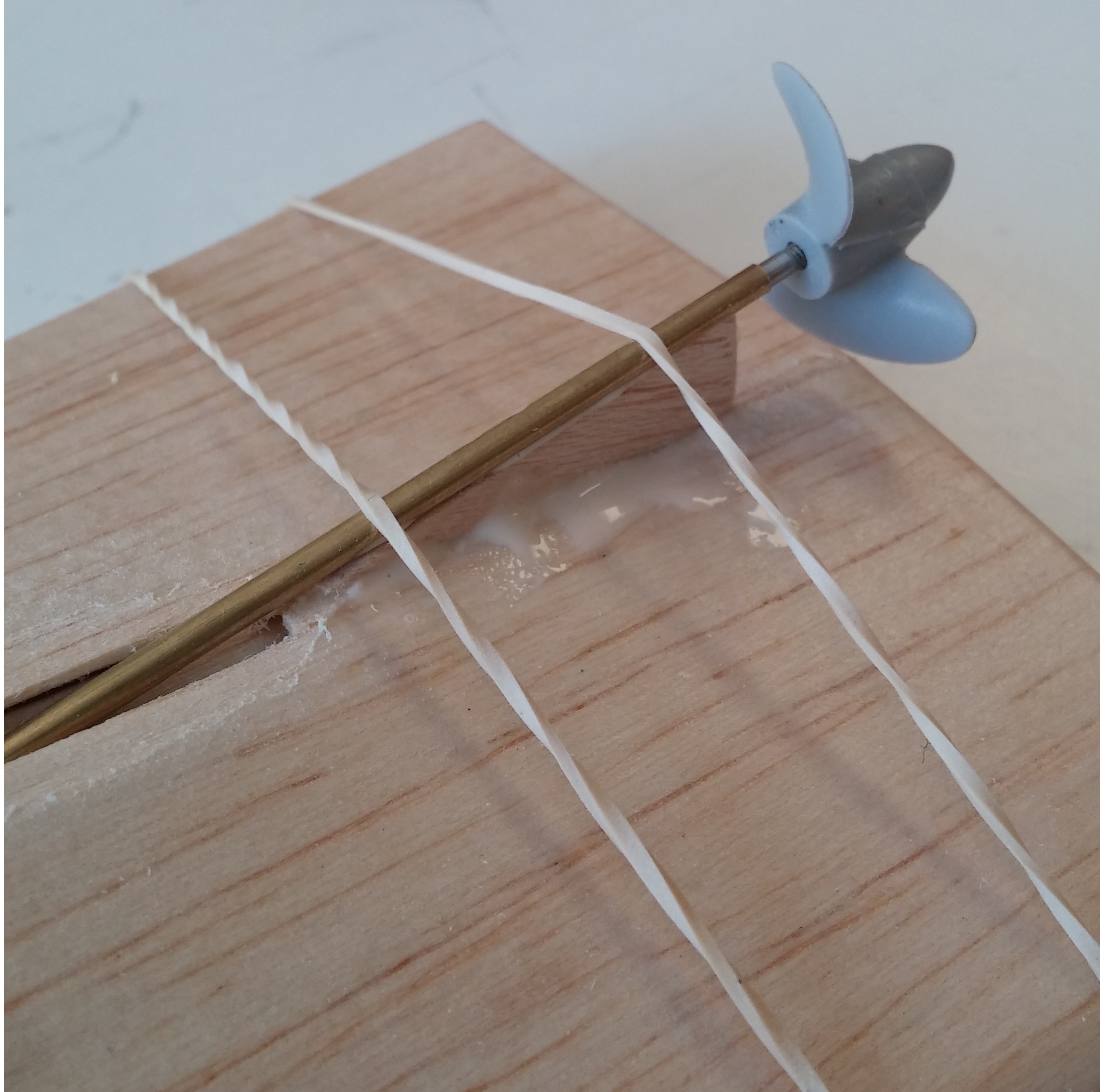
Check back soon to see a video of our first drive!
Update 1: Feb 14, 2014
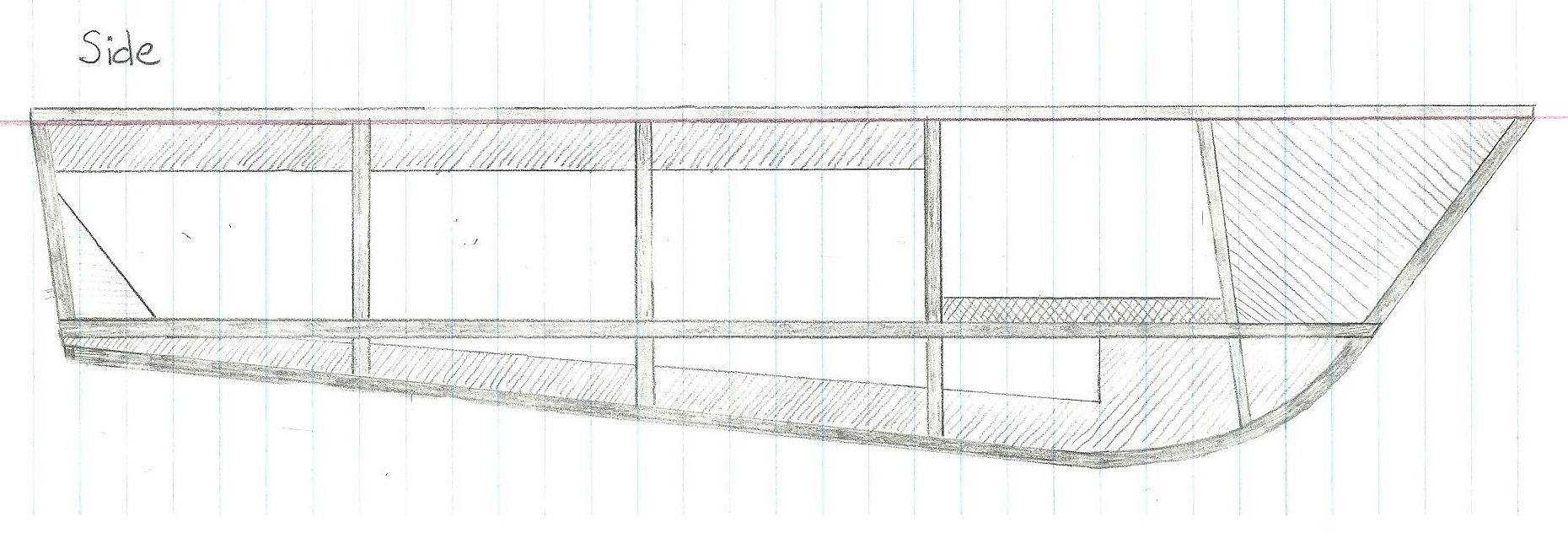
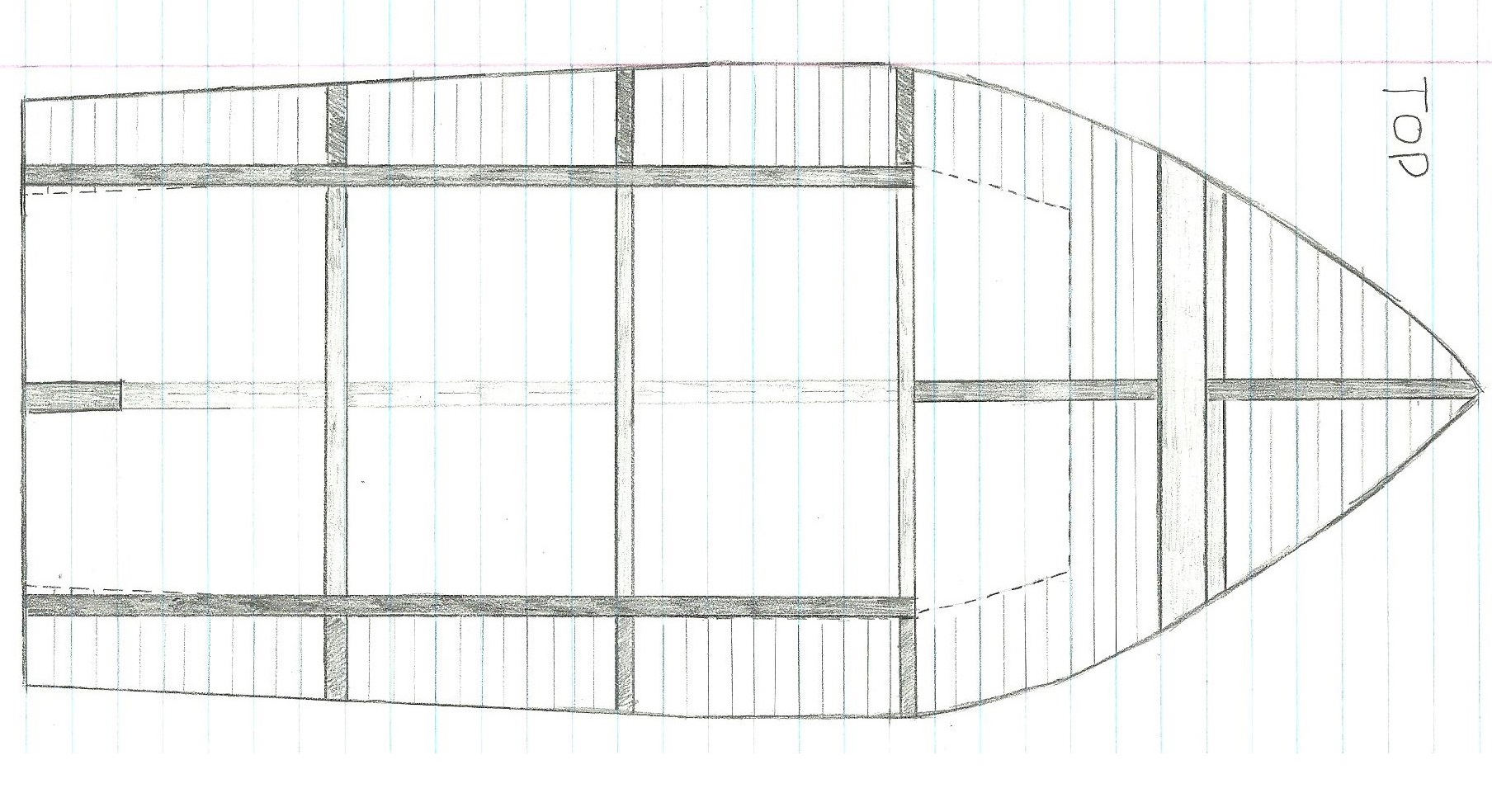
Below are some of the concepts that were drawn up by our group for the hull design.
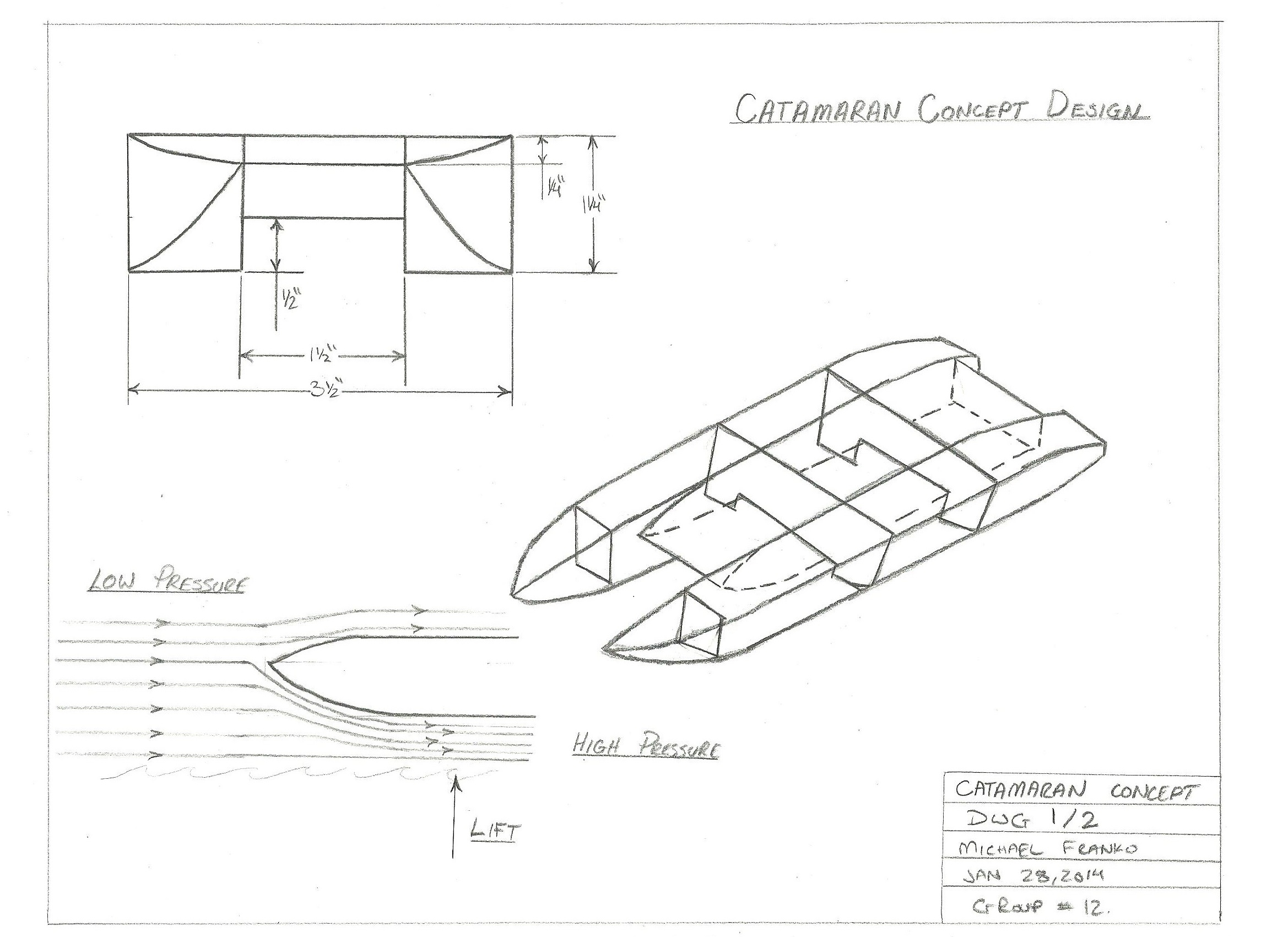
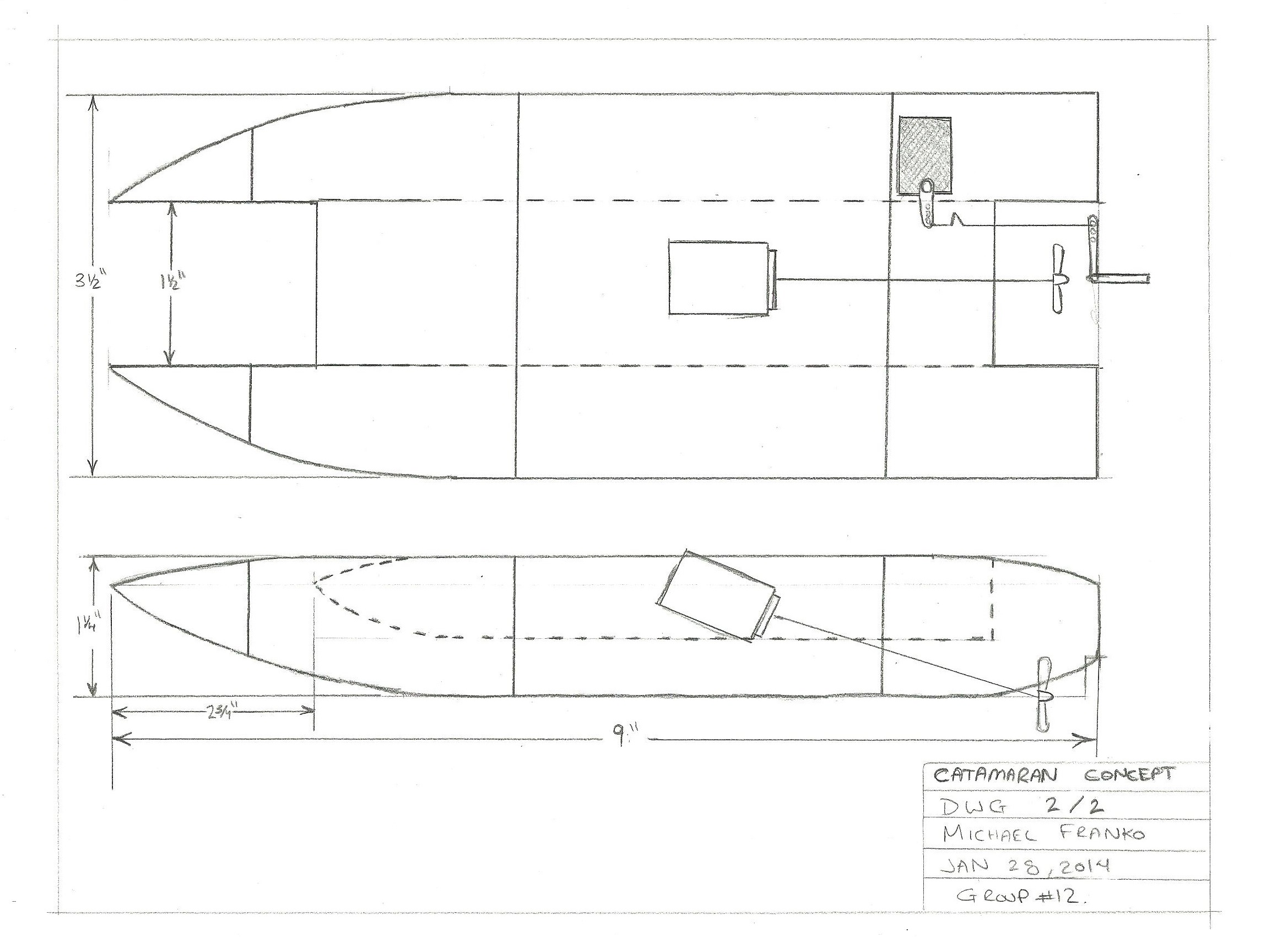
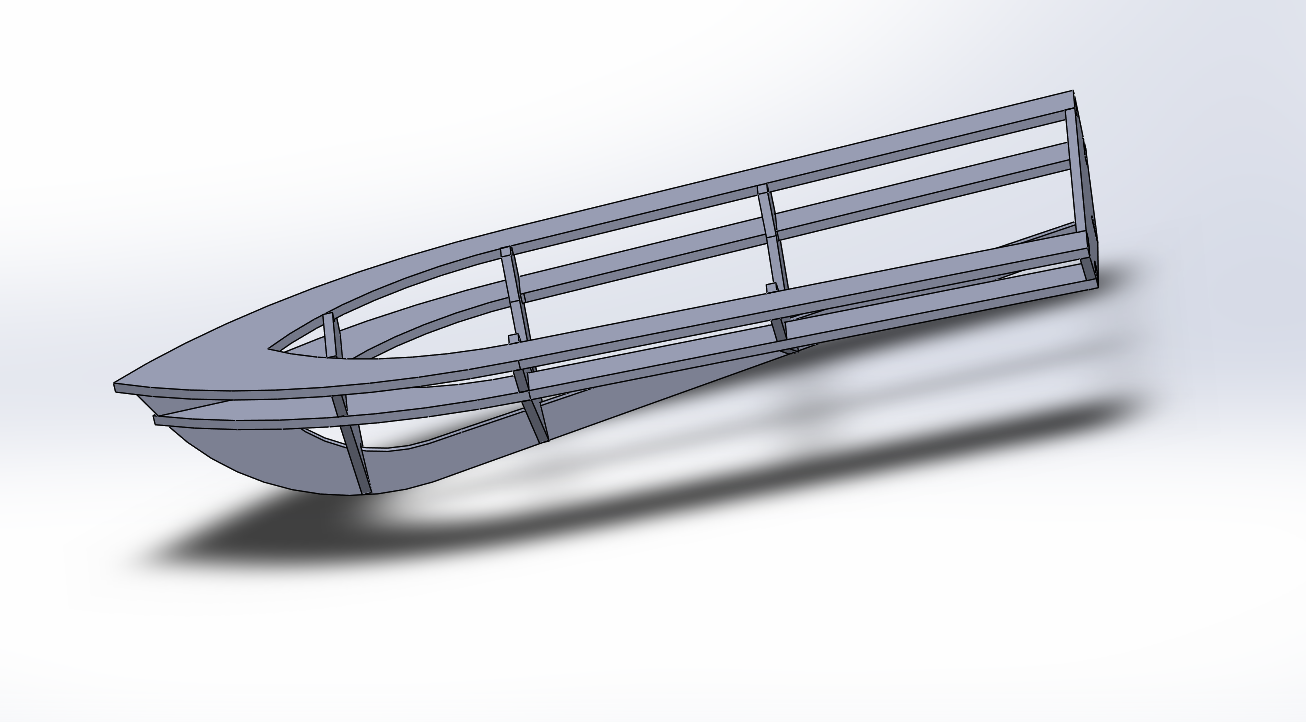
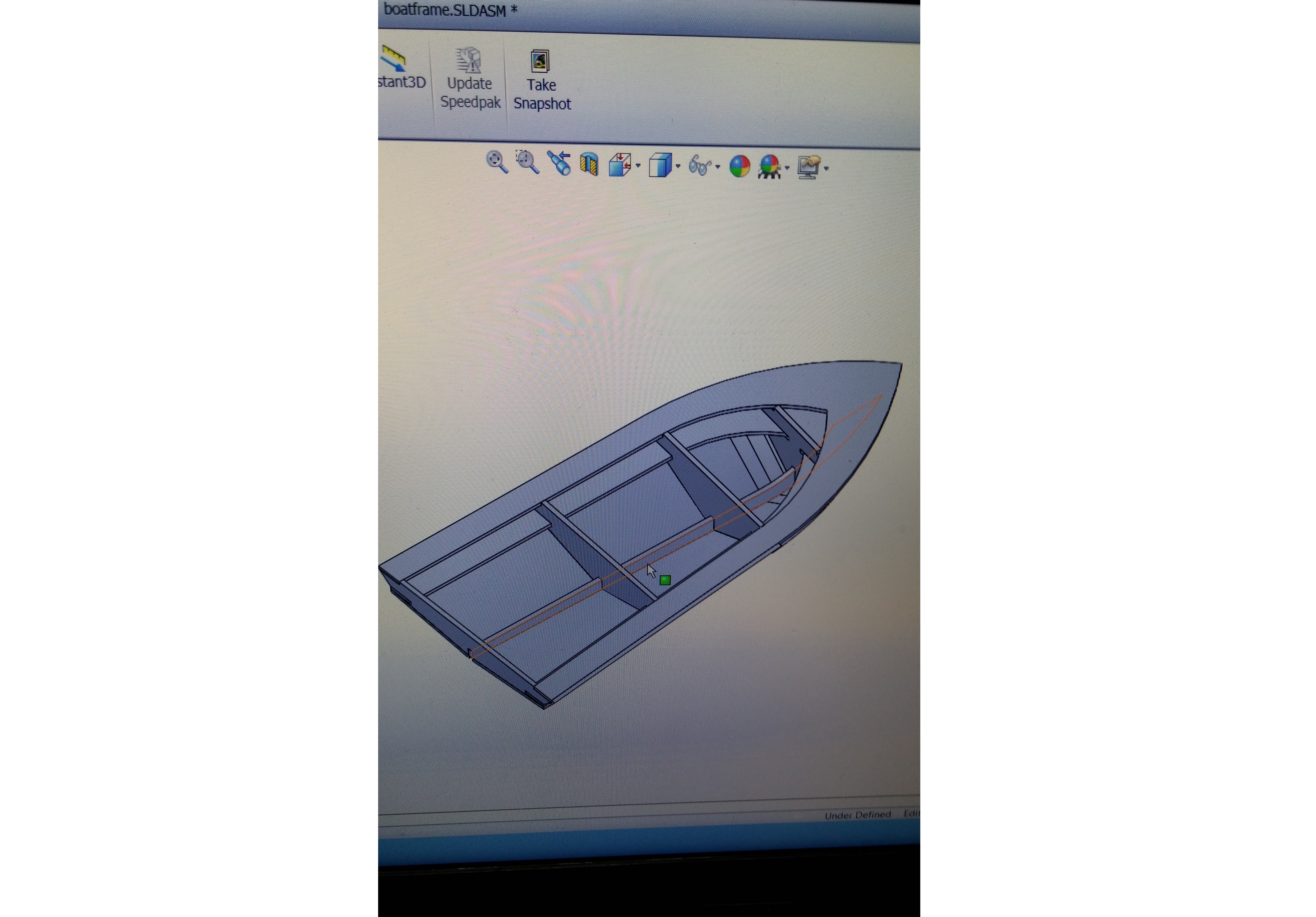
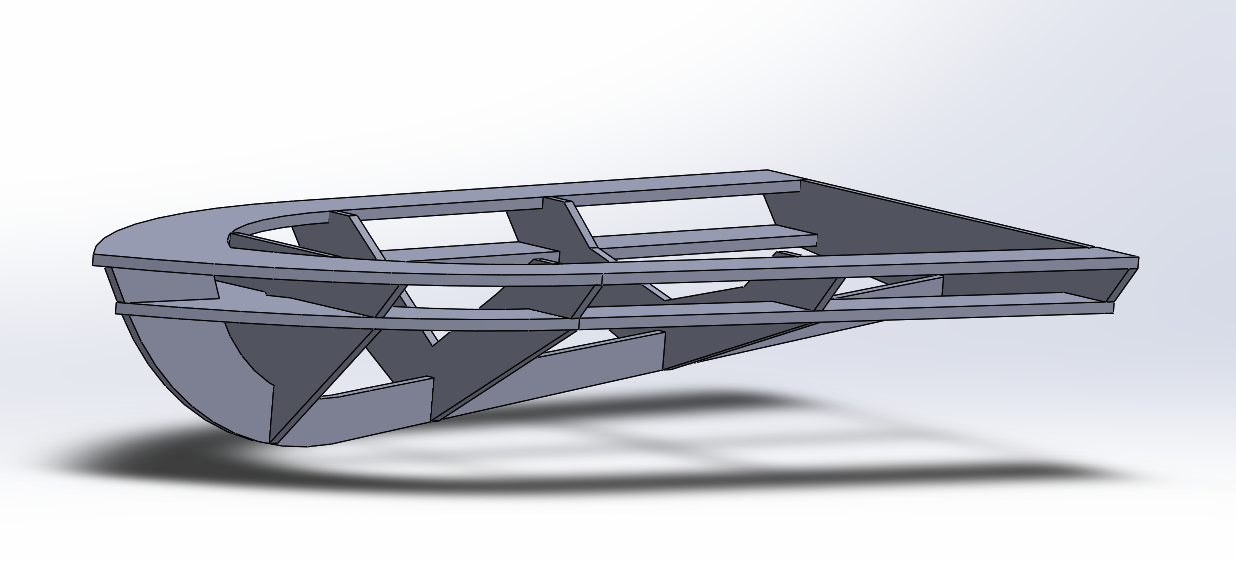
After doing some math and calculating the water level we found that the Catamaran would sit way too low in the water to make the design work properly. And, if we wanted to keep the scale, it would have to be way longer than the ten inches. So we went with the top design and put it into SolidWorks.
Once we had a boat hull design we went shopping!



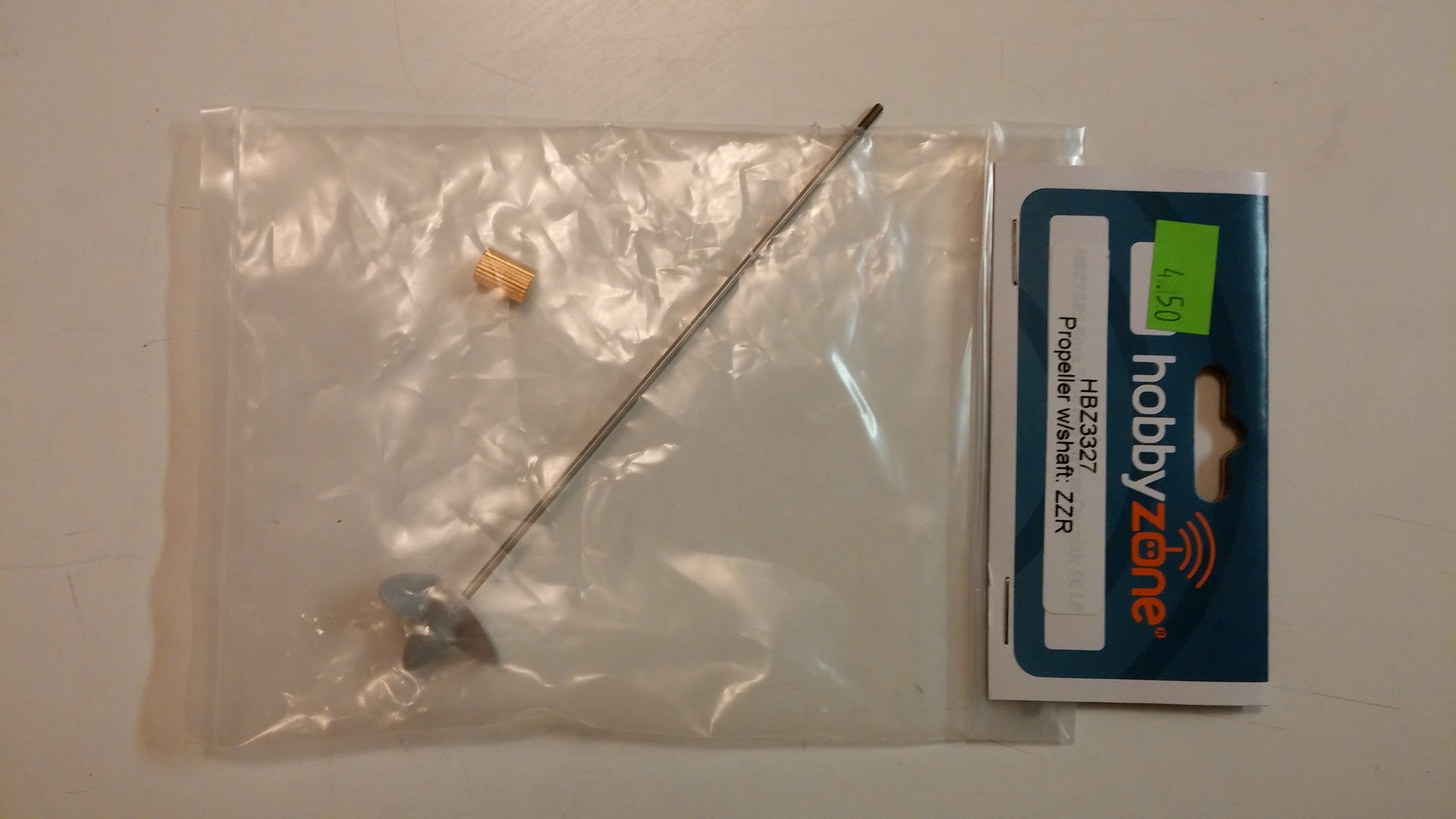
We managed to buy pretty much everything at a local hobbystore. After this we were able to start assembling. We printed the drawings and copied them onto the balsa to cut out the parts for the frame.
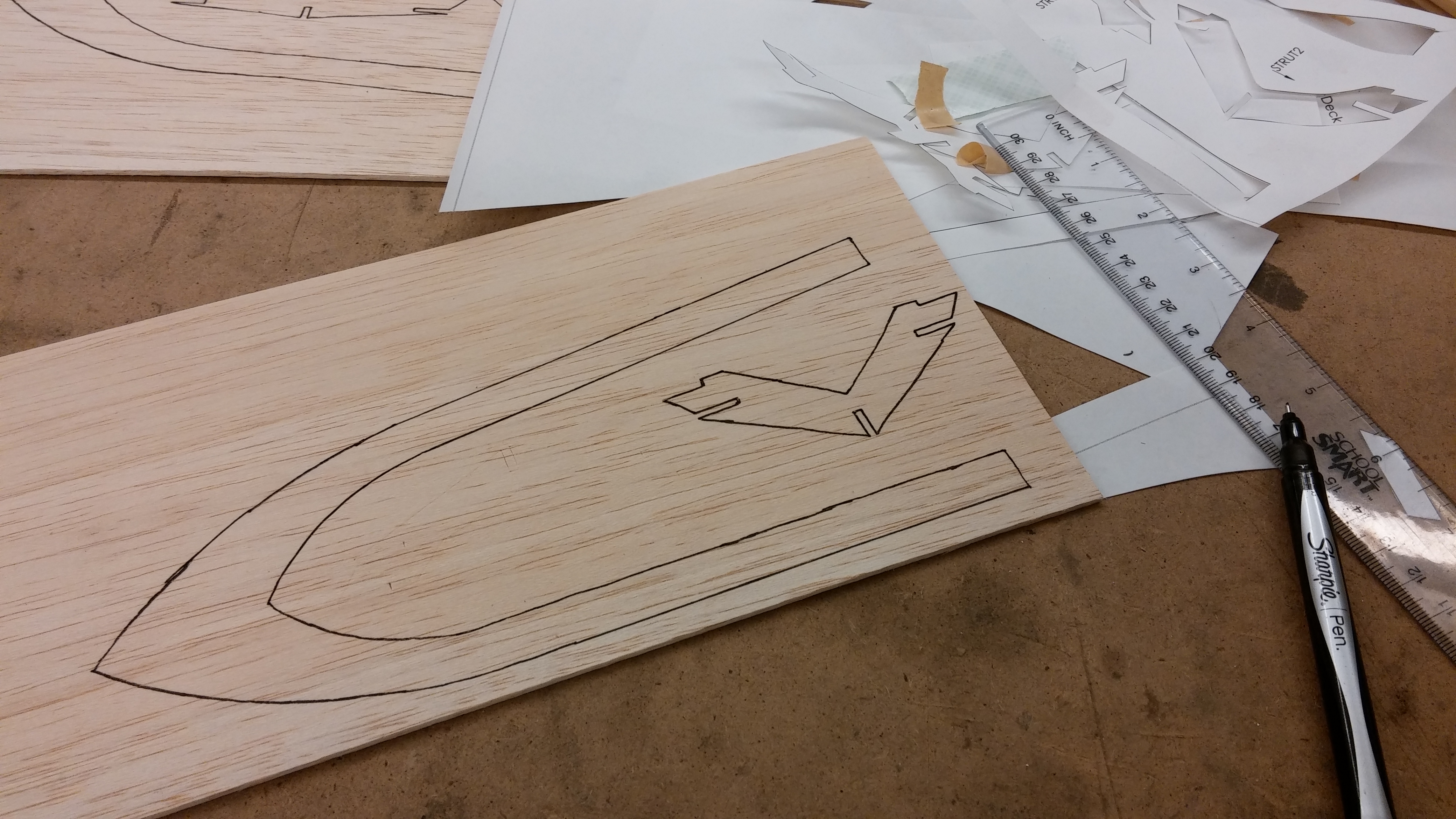


To plank the hull we glued peices of balsa to the frame and then bent them around the structure. After drying we trimmed the excess and sanded it smooth.
Below is the finished product! One fancy new boat!