3B
MTE 380: Engineering Design Workshop
Design Project
This semester we will be designing, constructing, and racing autonomous boats in a small pool.
There are updates! Come see all the cool pictures!
(Feb 21, 2014)
3A
SYDE 351: Systems Models
Final Project
In this course we designed and built a system which we would be able to model and then simulate using MATLAB.
In the system, a flywheel pushes a rod with magnets on it through a coil. This produces a current in the coil which is measured and feeds back into the motor controller. The elastic band on the end of the rod provides resistance in one direction and acceleration in the other direction.
ME 321: Kinematics and Dynamics of Machines
Final Project
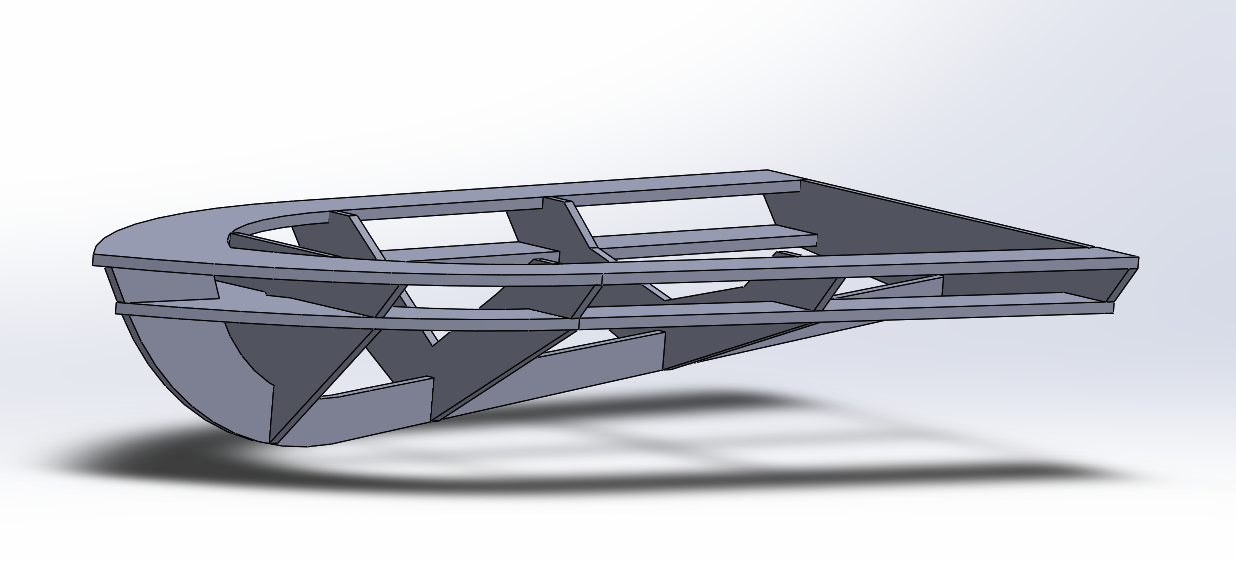
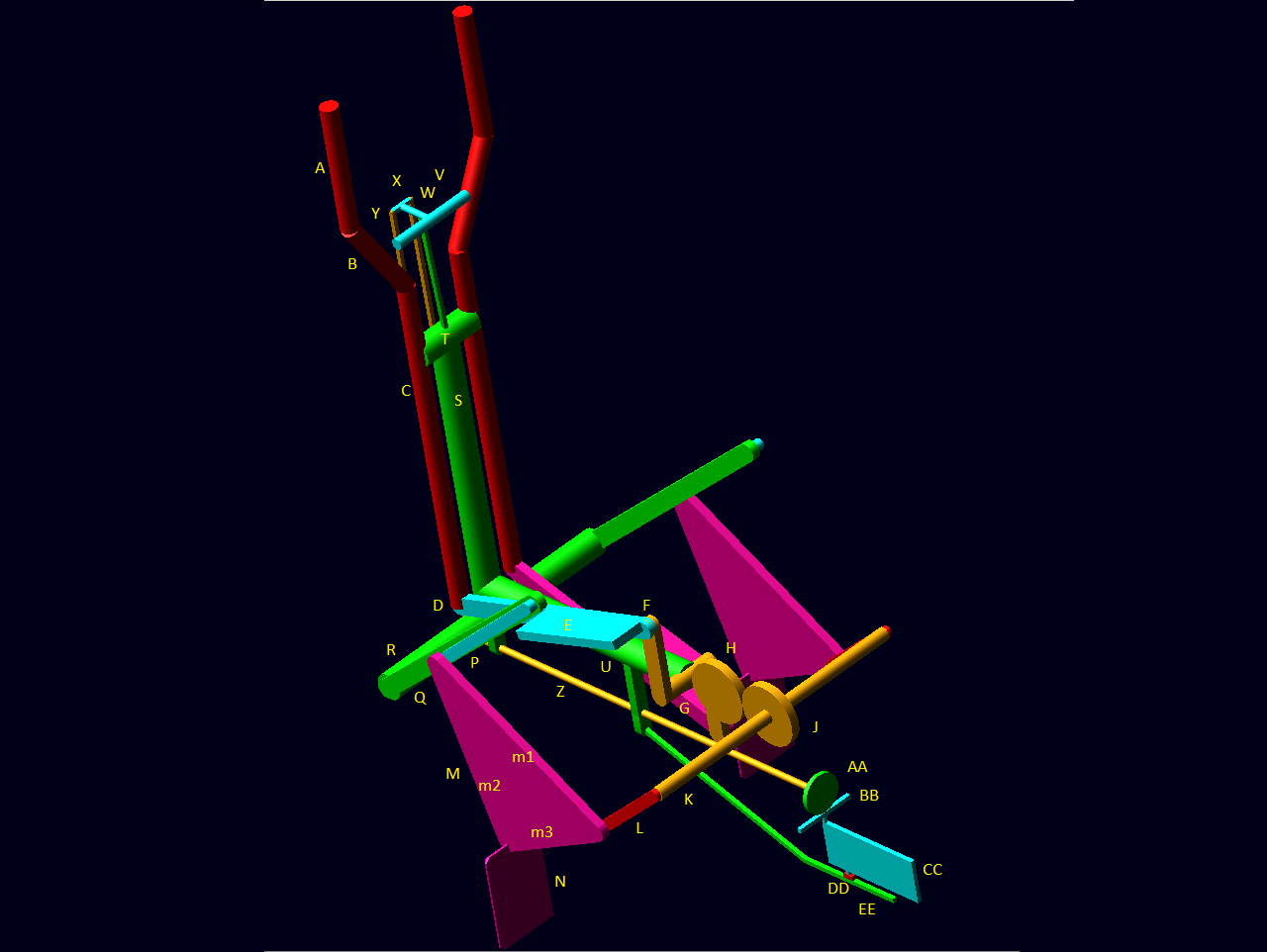
For this project we designed and modeled an aquatic vehicle to be used by seniors for recreation and exercise.
The design we came up with used an elliptical machine to provide the input of power for the craft and propelled itself using paddles mounted to either side of the craft. Steering was conrolled by a small handbar in between the grips.
2B
MTE 220: Sensors and Instrumentation
Lab
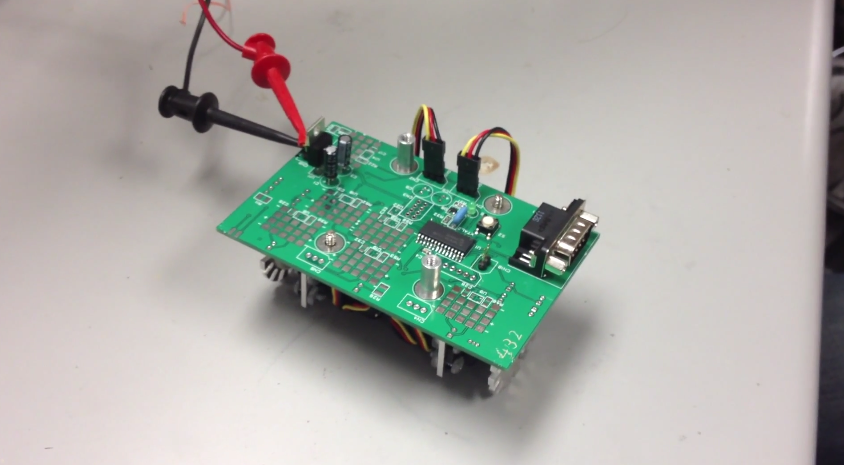
During the labs of this course we designed the circuitry related to the sensors of a line following robot.
The design primarily consisted identifying the nessecary operational amplifier and calculating the different values need for the resistances in order to properly filter the signals. The robot included two optical encoders, a hall effect sensor, and two reflectance sensors.
2A
MTE 219: Mechanics of Deformable Solids
Final Project
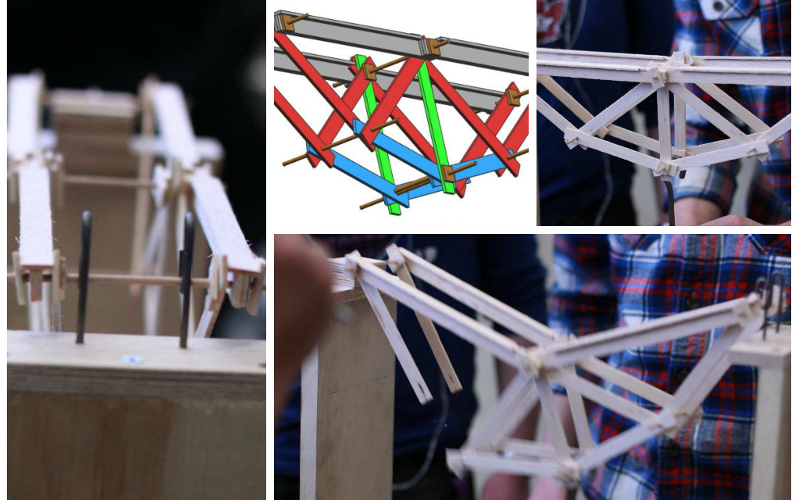
At the end of this course we designed and contructed bridges from balsa wood using physics learned in class to minimize the material needed to build the bridge.
The best design would be to have a bridge that would theoretically fail at all points simultaneouly. This design philosophy would elminate all excess material. Our bridge held 330 times its own weight(~25lbs) when tested.
1A
MTE 100: Mechatronics Concepts
Arduino Line Follower
We programed an arduino robot to follow a line through a course and successfully negotiate all of the obstacles in its path.