|
The electrical design can be broken down into 3 main sections; the microcontroller, the speed controllers, and the actuator controller. 1. The Microcontroller The microcontroller is necessary to precisely control the speed and actuator controllers, while allowing connectivity to a computer for software purposes. The microcontroller must be capable of being powered via USB or an external source. KickLogics solution: use an Arduino Duemilanove with a 328 Mega chip to control the motor speed signals, as well as the actuator relays. The Arduino board has 13 output pins and is capable of sending pulse-width modulation (PWM) signals which may be used for the speed controller. 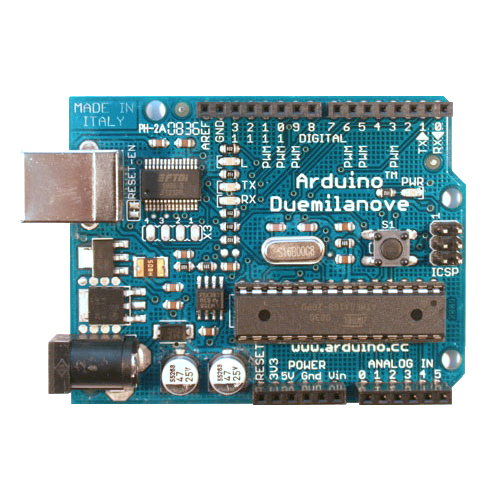 2. The Speed Controllers The speed controllers must be capable of handling a 36V source, while being controlled via 5V inputs. Although motors will be rotating in opposite directions, bidirectional control is not necessary. KickLogics solution: Using two Critical Velocity 15A PWM motor speed controllers provided ample control over motor speeds and interfaces well with microcontrollers. With the ability to handle 36V inputs, this proved to be the perfect match to the motors that have been previously selected. 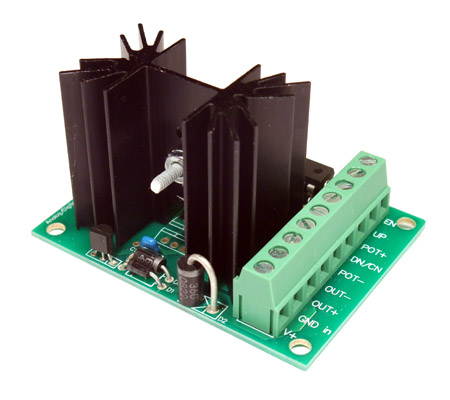 3. The Actuator Controller For the linear actuator to function properly, a controller is required to manage the direction of voltage running through the actuator. The controller must be capable of transferring up to 12V and 2A. KickLogics solution: Instead of using a controller, it was found to be more cost effective and more efficient to use two relay switches to control the actuator voltage. By implementing a simple circuit, the need for a costly controller was avoided. 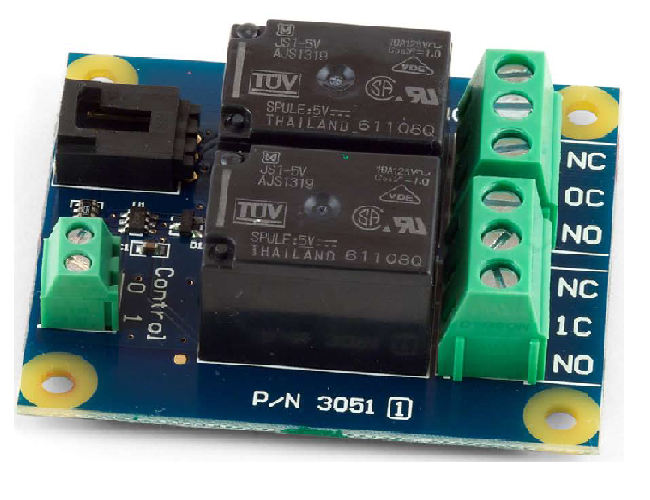 The Final Product Similar to the Mechanical and Software components, a lot of time and effort was put into taking the electrical components of the FTM from their design phase to their final product phase. And the hard work paid off! 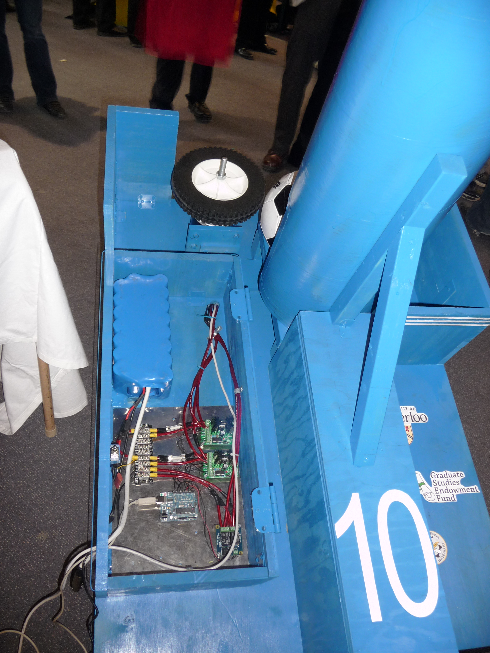 Top-view image of the completed electrical assembly on the FTM 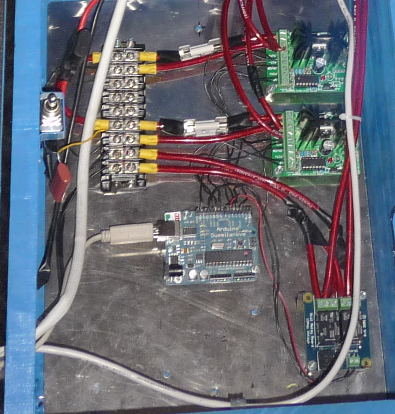 Top-view (zoomed) of the completed electrical assembly on the FTM |

Kick Logic
University of Waterloo
200 University Avenue West
Waterloo, Ontario, Canada N2L 3G1
519 888 4567
feedback | privacy statement | http://www.uwaterloo.ca