Proposed Solution
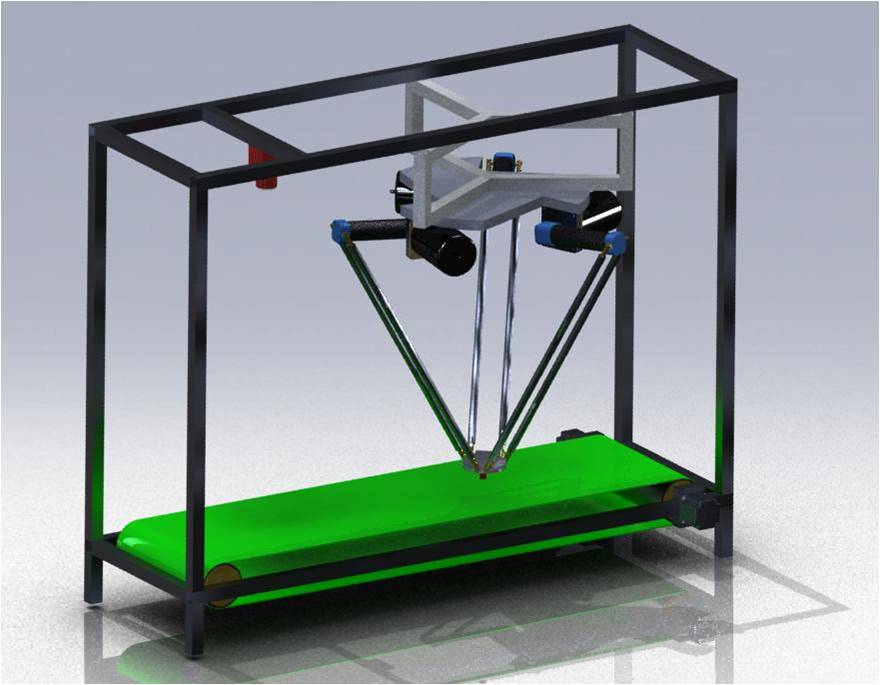
In order to meet the design criteria and ensure the satisfaction of our associated collaborator (the ABC company), the team decided to develop a delta robot mechanism for pick and place operations and a vision system for the detection of non-conforming biscuits. A pictorial overview of the system is given below.
Return to Top
Operation Specifics
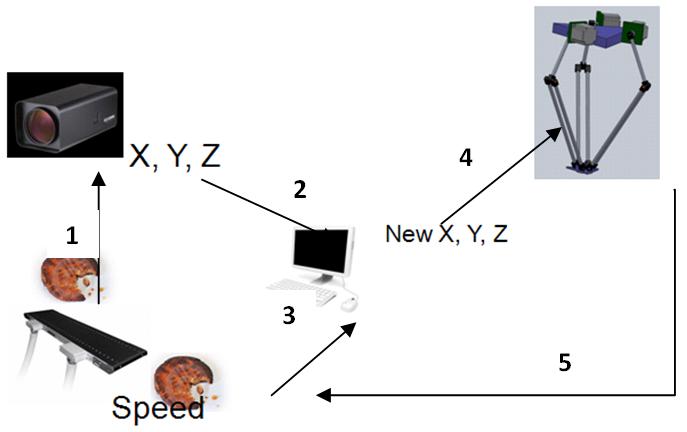
Sequence of events corresponding to the numbered arrows above:
- Images are captured from the camera
- A defective biscuit is identified and its x,y,z coordinates are sent to the computer
- The computer takes the speed of the conveyor as an input to calculate new x,y,z coordinates of the biscuit on the conveyor
- The new x,y,z coordinates are sent to the robot which then translates these into servo angles
- The robot moves according to the servo angles calculated and picks up the defective biscuit
Return to Top
The Delta Robot Mechanism
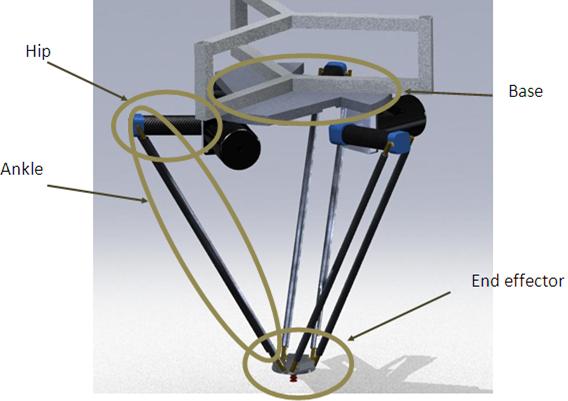
The figure below depicts the delta robot mechanism; these robots are also known as parallel robots. The delta robot consists of two platforms: the upper one with three motors mounted on it and a smaller one with an end effector. The platforms are connected through three arms with parallelograms; the parallelograms restrain the orientation of the lower platform to be parallel to the working surface. The motors set the position of the arms and thereby the XYZ position of the end effector. The delta robot links have common names in literature. The top links are referred to as "hips", while the bottom links are referred to as "ankles".
Return to Top
Vision System
The vision system is a combination of a camera (the hardware) and image processing algorithms (the software). The hardware has two components: a camera to collect images and an interface wire to connect the camera to the PC.

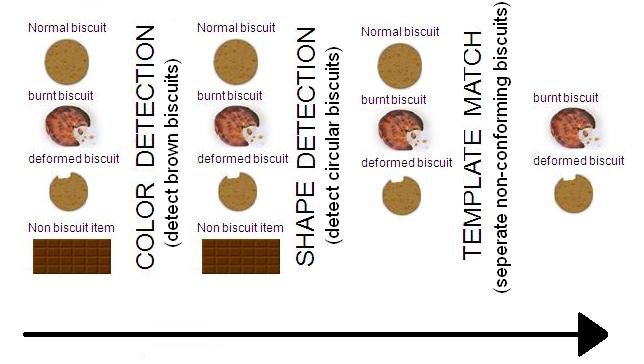
OpenCV, an open source computer vision library developed by Intel, will form the basis on top of which the remaining software mechanics will be developed. Key functions and algorithms from OpenCV will help in the aid of biscuit detection and defect finding. The figure below dictates the flow of defect detection.
Return to Top