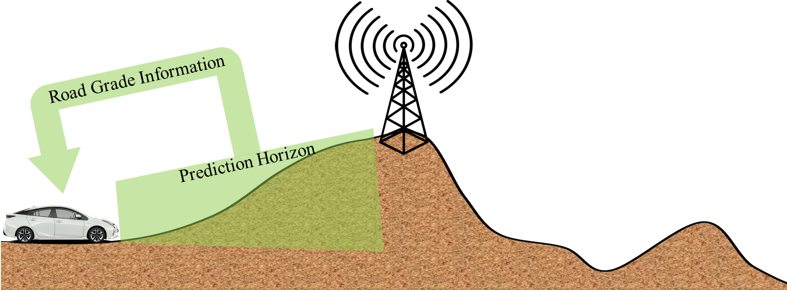
Ecological Adaptive Cruise Control with Optimal Lane Changing
Nonlinear Model Predictive Control (NMPC) technique is employed to design an Ecological Adaptive Cruise Control (E-ACC) with optimal lane changing. In such control system, information about the road grade and traffic ahead obtained through onboard sensory and communication devices are integrated with optimal control for ecological speed control of a semi-autonomous car.

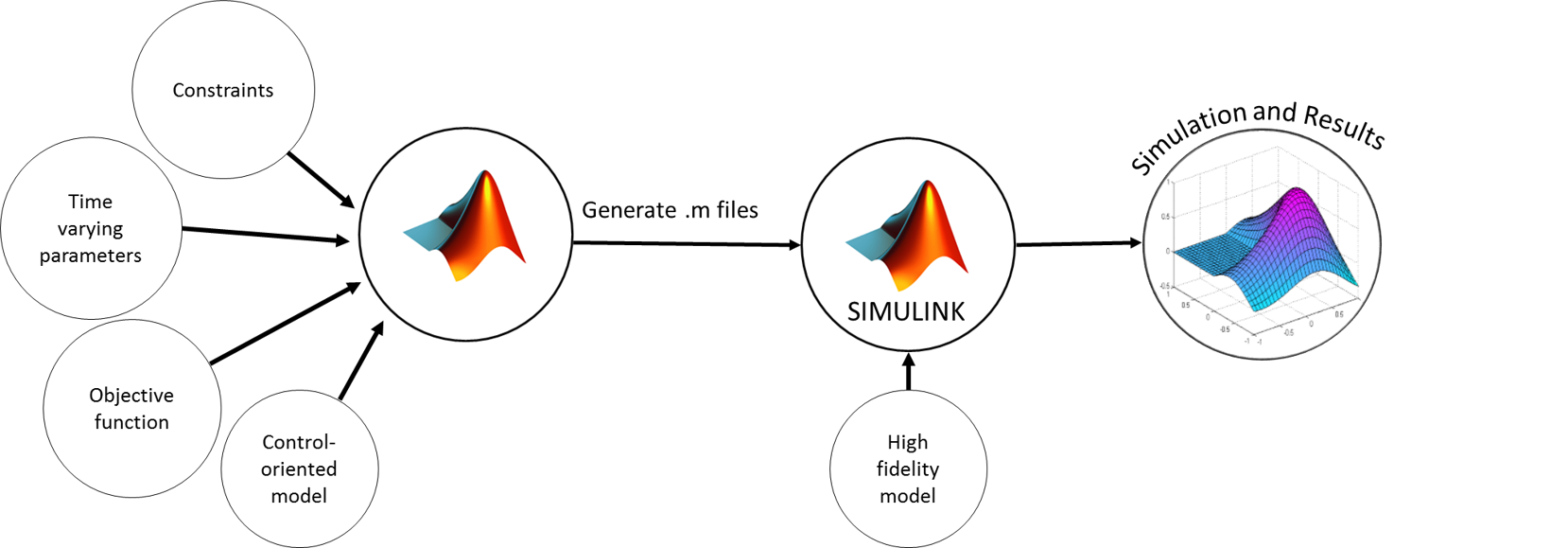
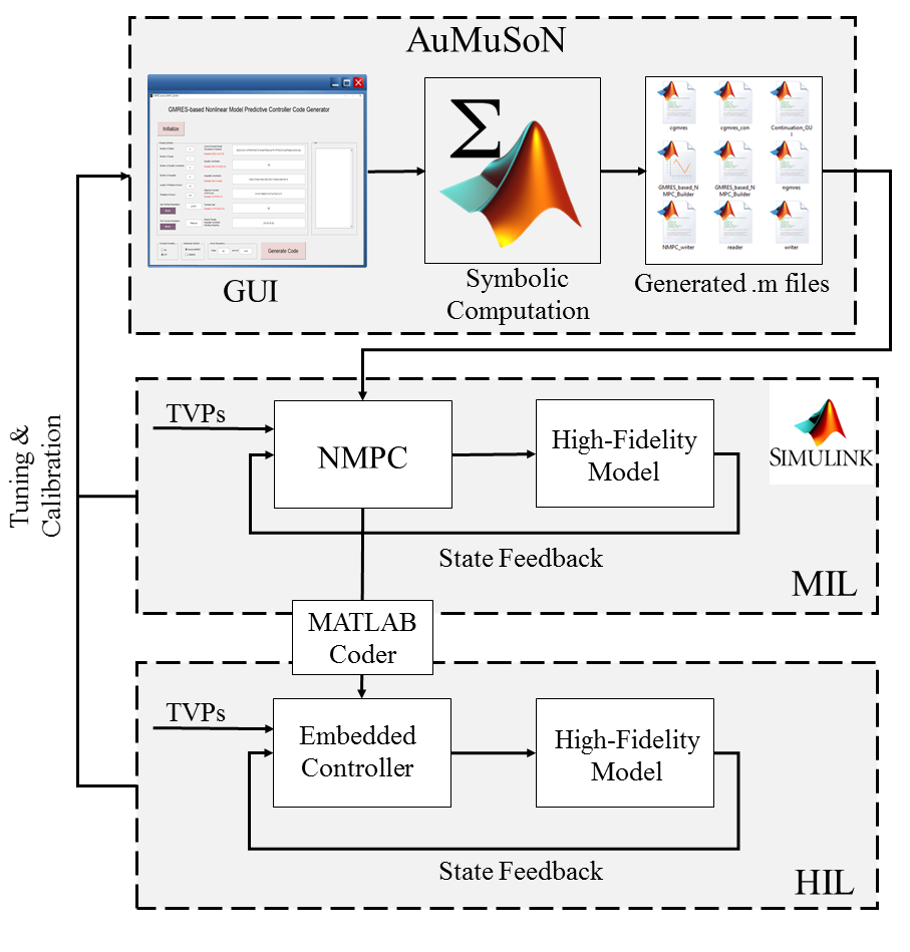
Automatic Code Generation of Real-Time NMPC
We develop and utilize a real-time NMPC code generation tool, named MPsee. MPsee is a mathematical program that generates NMPC codes based on GMRES linear solver. Since this tool works in MATLAB environment and generates relative Simulink blocks for the auto-generated NMPC, it highly facilitates the design, calibration and evaluation workflow for MATLAB/Simulink users. You can download MPsee Toolbox from the following sources:
MathWorks File Exchange
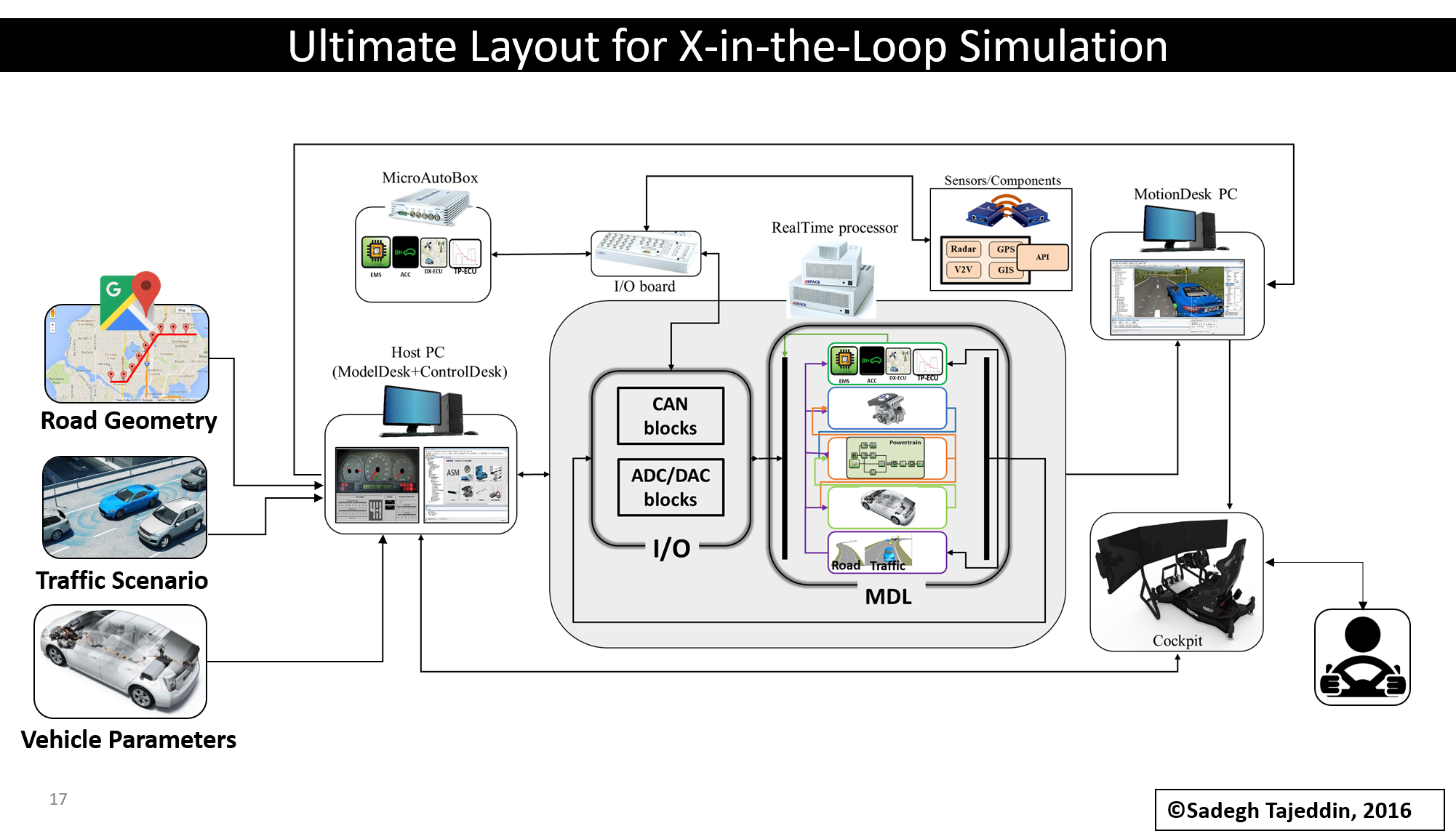
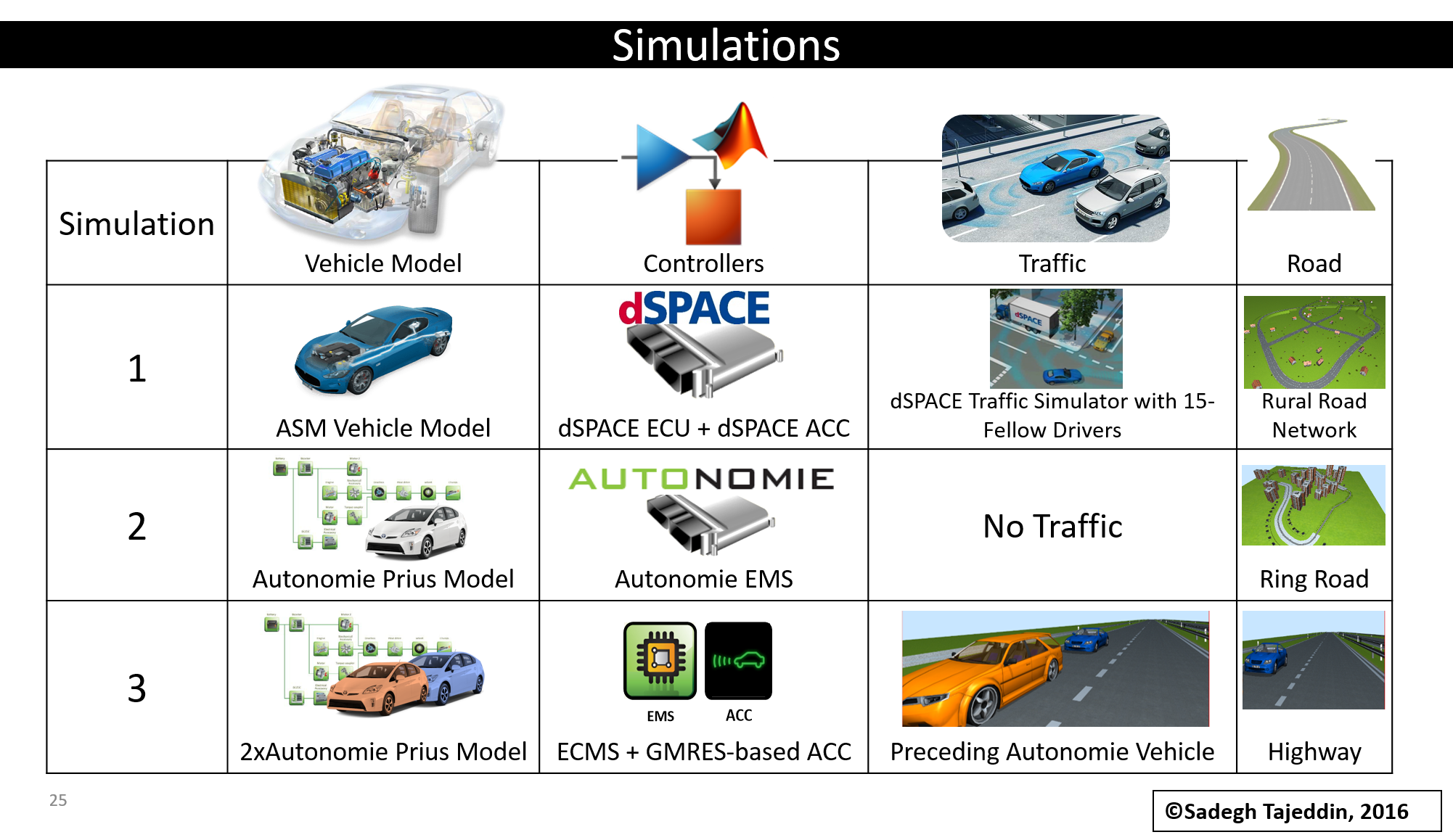
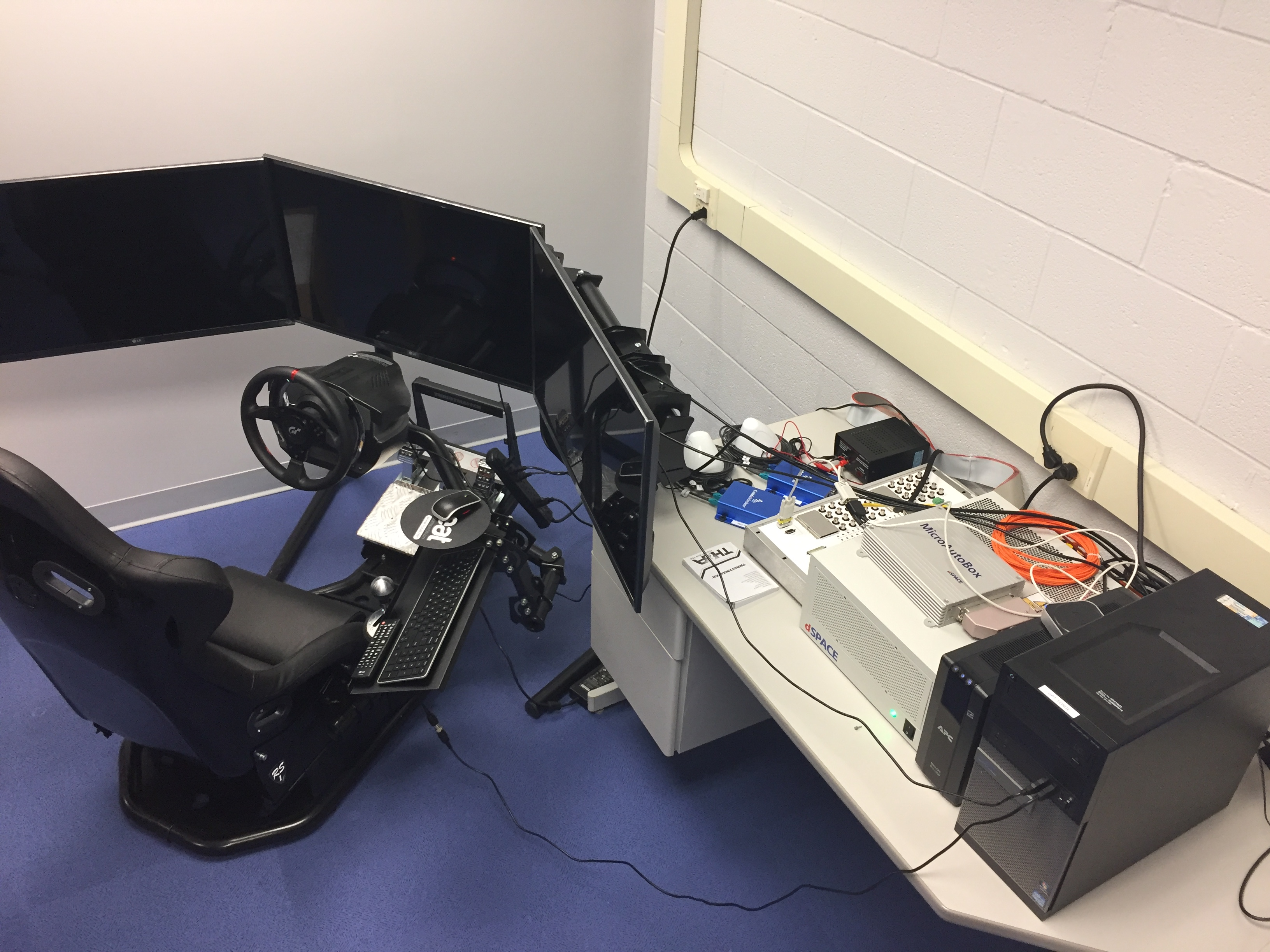
Virtual Driving Simulation Test Rig
Integration of dSPACE ASM vehicle dynamics software and traffic simulator with dSPACE MotionDesk software has enabled us to struct a virtual driving simulator. The two main goals of this project are: 1) to rapidly generate and record driving data under different driving conditions; and 2) to rapidly test and evaluate custom intelligent controllers in virtual environment and in interaction with a driver. The simulation runs on a real-time processor and different control systems can be implemented in real-time on prototype ECUs.