MAR 10
Tested the teleop for the first time. We were surprised that it worked so well on the first try !
MAR 10
Fully tested the webcam and the ball detection algorithm. It is not perfect but it should be good enough over time. Will need to try and fine tune the algorithm.


MAR 08
Completed initial driver for the ultrasound sensor.
MAR 08
Got camera working on beaglebone black. Had to deal with some USB connection issues.

MAR 07
Started driver for ultrasound sensor. Used a voltage divider to get the sensor output voltage below 1.8V since Beaglebone Black only accepts 1.8V on its analog inputs.
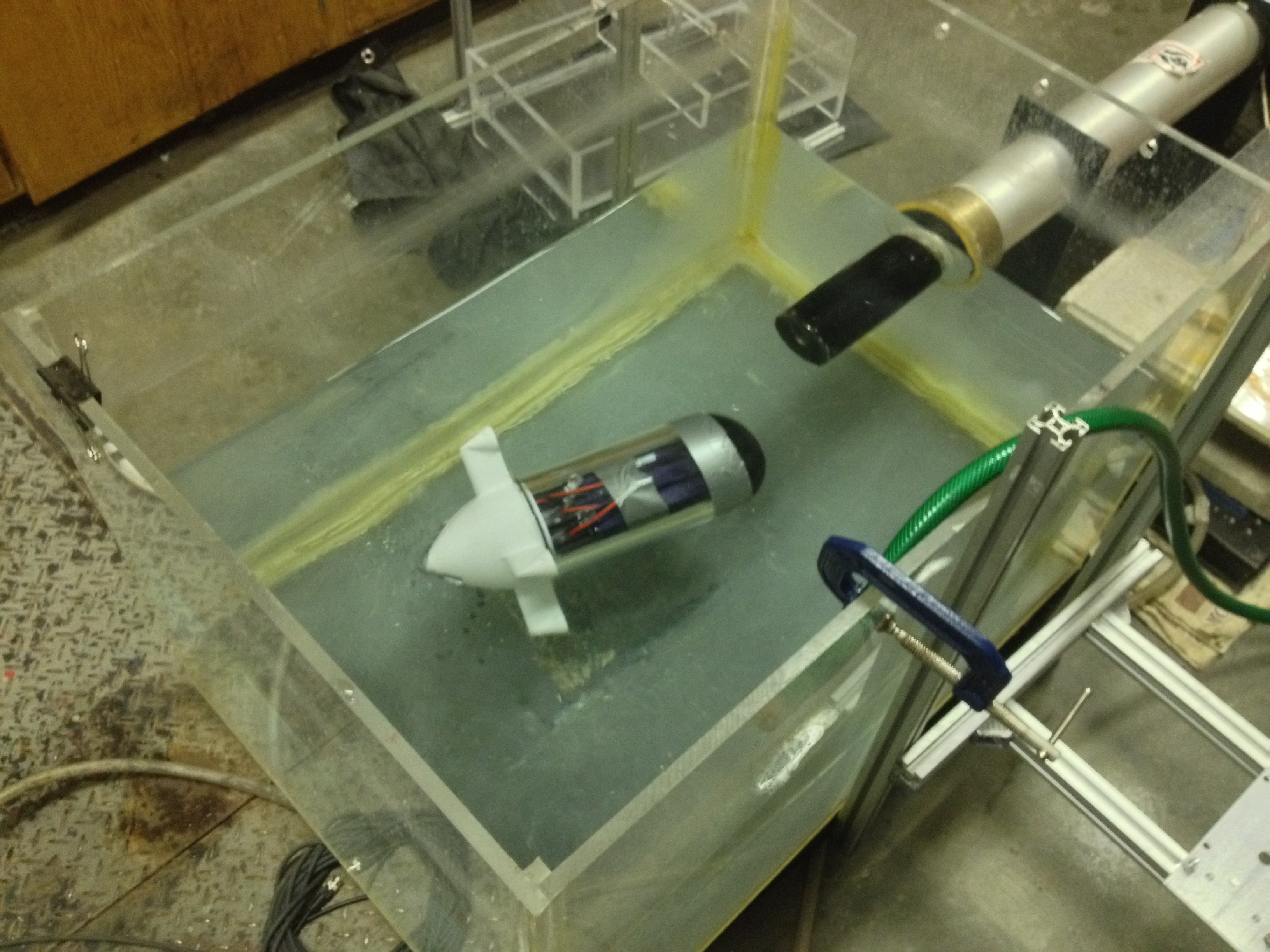
MAR 04
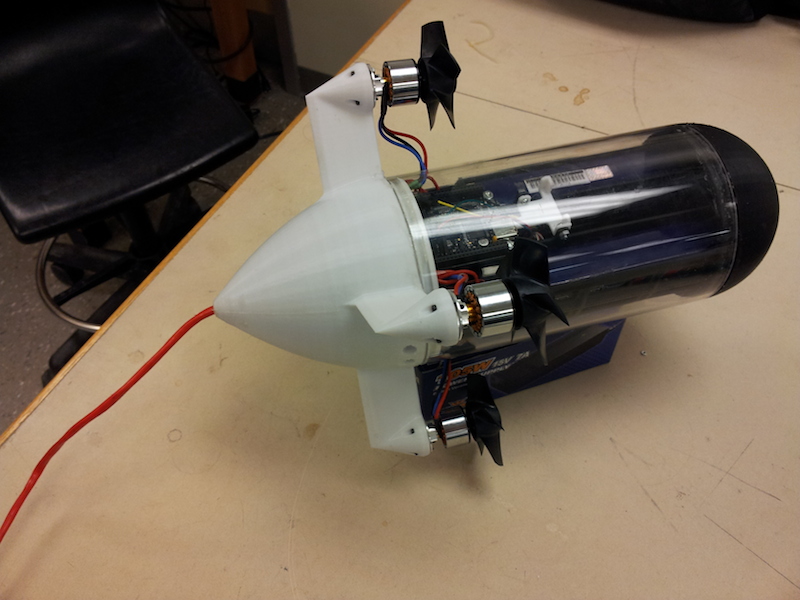
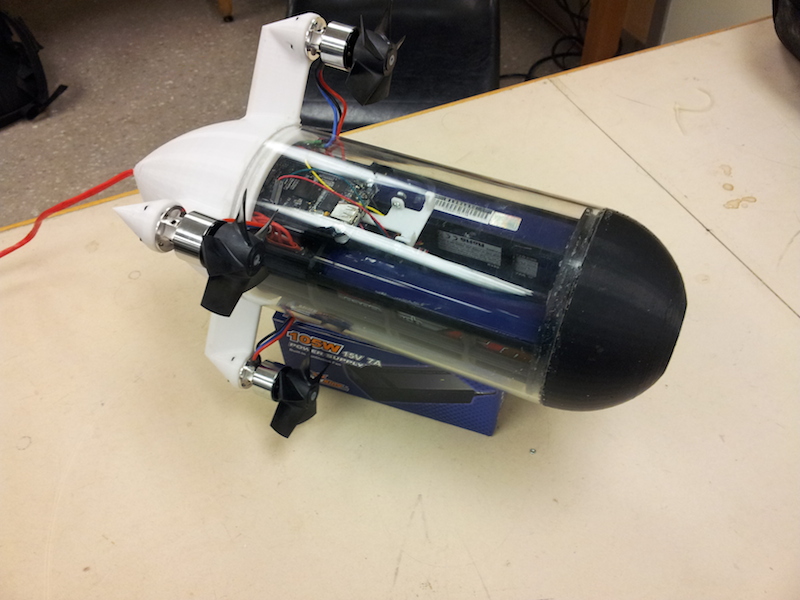
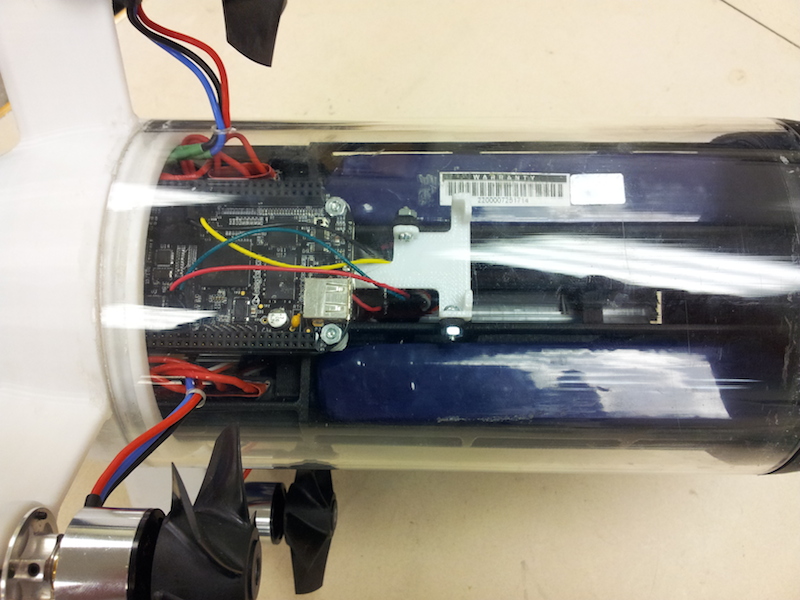
Fully assembled the submarine with all electricals wired together. Tested and waterproofed motors.
MAR 01
Purchased a chip to convert 3.3V logic level of PWM pins on Beaglebone Black to 5.0V required by the Electronic Speed Controllers. The motors are now able to be controlled.
MAR 03
Attached the four brushless DC motors onto the submarine with Powerpole.
FEB 27
Modified the IMU node to send quaternions instead of euler angles to the controller.
FEB 25
Finished basic controller and keyboard teleop funcion for the submarine.
FEB 18
Programmed ESC for the brushless motors on BeagleBone Black.
FEB 17
Waterproofed the submarine, leaving the submarine in the water tank for 18 hours for testing.

FEB 15
Finally cross-compiled and installed the IMU ROS node after many cross-compile and architecture issues.
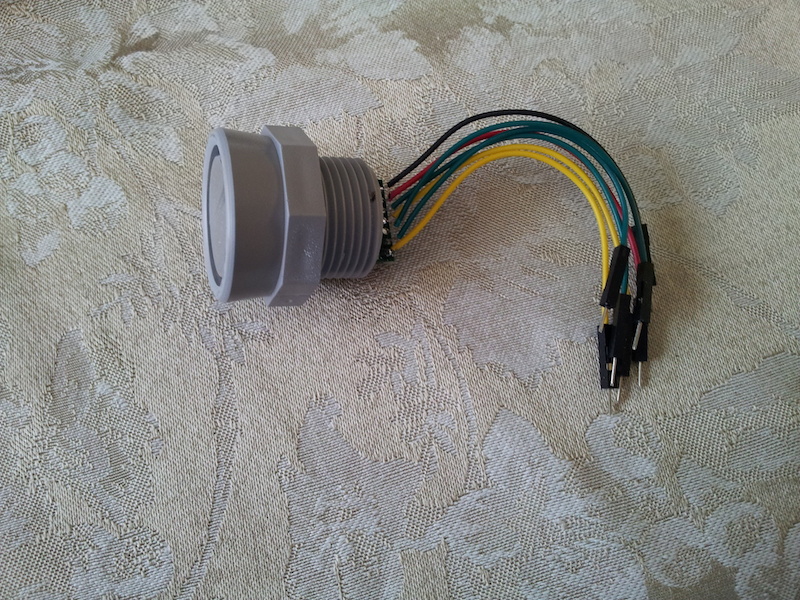
FEB 14
Finally received the ultrasound sensor for the submarine and soldered wires to the various pins. Will now be able to start developing the driver for it.
FEB 12
Recompiled the BeagleBone Black PWM kernel so that different duty cycles could be sent to all of the motors.
FEB 09
Assembled main parts.
FEB 02
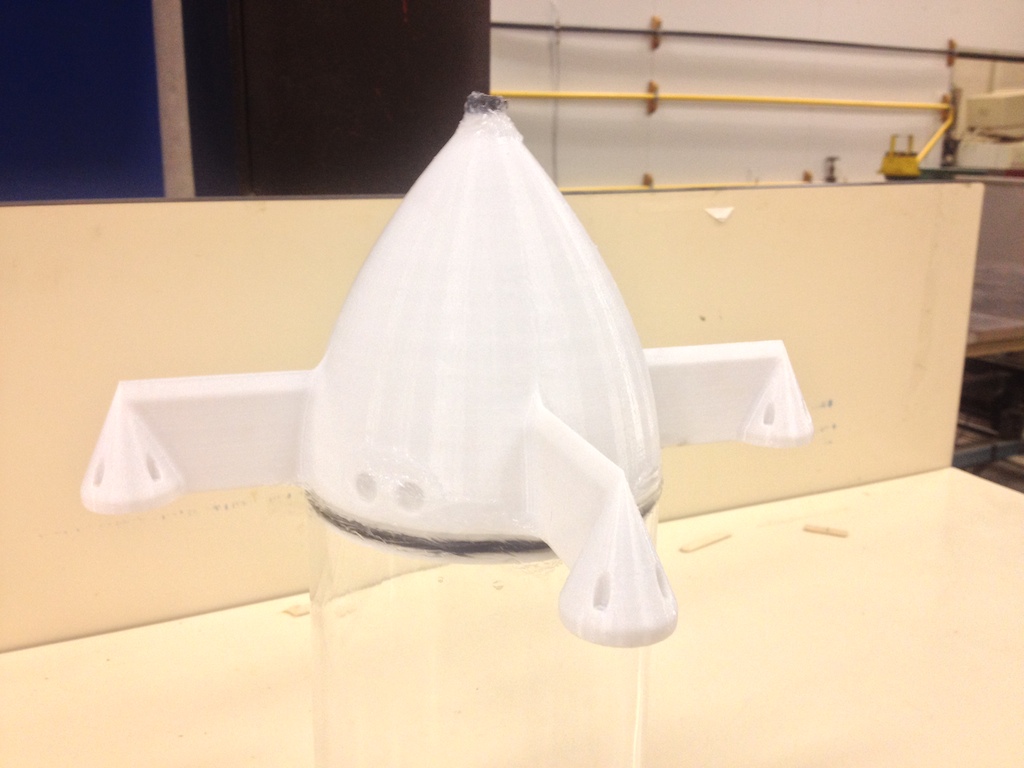
Got the 3D printed hull and started to assemble physical parts.

FEB 01
Set up the cross-compile environment for the BeagleBone Black.
JAN 25
The ball tracking algorithm is successfully locating the ball.

JAN 21
Partially completed soldering electrical connections.
JAN 20
Finished mechanical redesign which changed the location of the motors.