 |
 |
 |
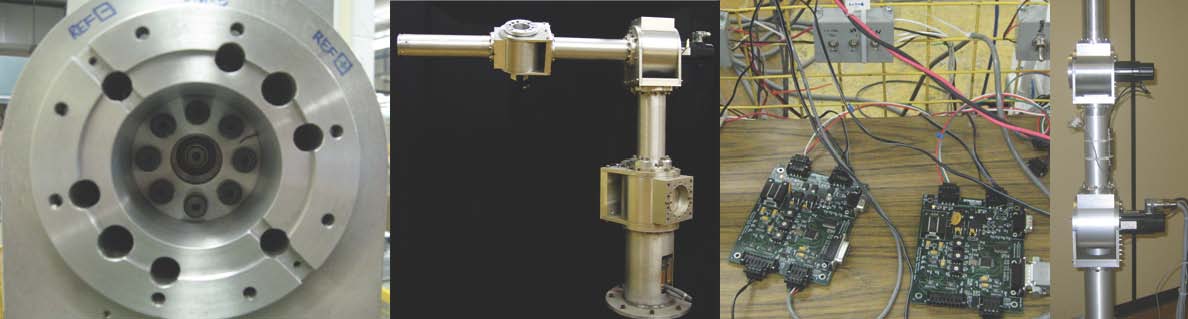
MRR - Mechanical Design
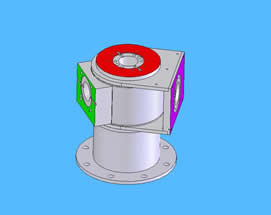
Each joint module consists of the electrical motor, Harmonic Drive, encoders and hall-effect sensors embedded. the joint module has two mechanical input and two mechanical output ports. Input ports should be connected to the links closer to the base of the robot while the output ports should be connected to the links closer to the end-effector. The joint will produce different types of motion depending on which input and output ports the links are connected to. I was engaged in all the steps involved in part selection and concept design of the MRR joint module.