-
Home
> Research
Research
My research can be categorized into four distinct but interconnect groups:
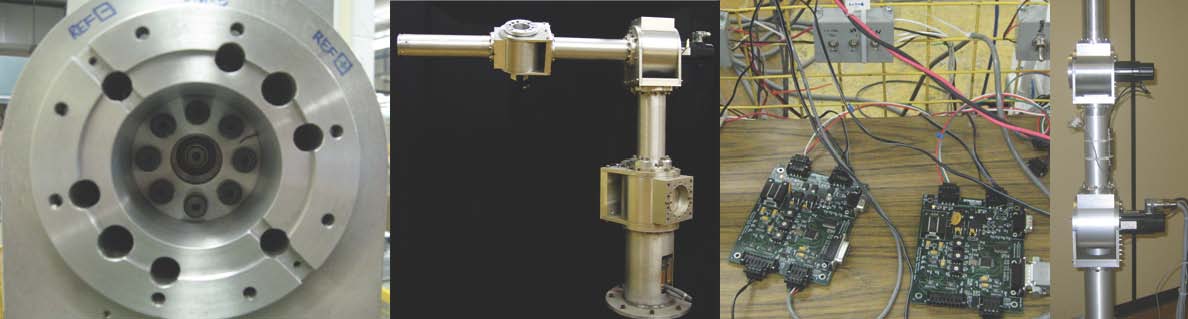
Design and Development of Modular and Reconfigurable Robots
Task-Based Configuration Optimization (TBCO) Algorithms
Development of Multi-Solution Inverse Kinematic Solver
Trajectory Optimization Using Multiple Solutions of the Inverse Kinematic Problem