 |
 |
Modular and Reconfigurable Robot (MRR)
The majority of the existing robotic manipulators are based on a fixed joint and link configuration and
are designed to perform their duties for a general set of tasks such as assembly, pick and place,
etc. Although these robots can perform well in a set of particular workspaces, they have limited
adaptability towards changes in either environment or the prescribed task. In case of a change
in the task space, environment, or product, numerous problems could occur as a result of robot singularities, saturations of the torques in 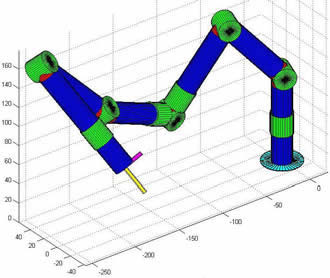 the actuators, or mechanical limitations in joint modules. Hence, conventional fixed configuration industrial robots can not satisfy the increasing demand for the modern flexible and versatile automated manufacturing facilities. The answer to these insufficiencies is a breed of industrial manipulators called Modular and
Reconfigurable Robots (MRR). These robots are assembled from a variety of modular components
and can be physically configured to meet the requirements of the work space and the task at
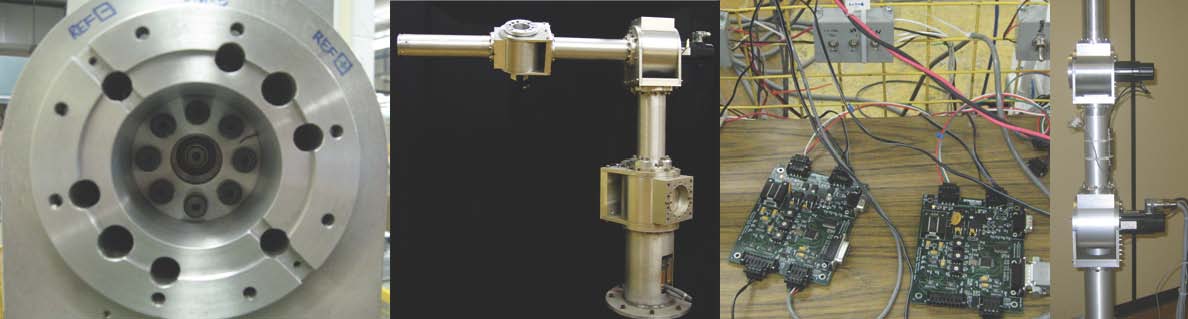
hand. The set of modules usually consists of joints, links, and end-effectors. Joint modules are the
actuators that provide the degrees of freedom of each robot. Each joint module may include embedded
actuators, optical encoders, torque sensors, Hall-effect sensors, gear transmission mechanisms,
and controllers. Link Modules of varying length connect the joints to each other. The
end-effector module consists of the tools required to interact with the robot environment.
the actuators, or mechanical limitations in joint modules. Hence, conventional fixed configuration industrial robots can not satisfy the increasing demand for the modern flexible and versatile automated manufacturing facilities. The answer to these insufficiencies is a breed of industrial manipulators called Modular and
Reconfigurable Robots (MRR). These robots are assembled from a variety of modular components
and can be physically configured to meet the requirements of the work space and the task at
hand. The set of modules usually consists of joints, links, and end-effectors. Joint modules are the
actuators that provide the degrees of freedom of each robot. Each joint module may include embedded
actuators, optical encoders, torque sensors, Hall-effect sensors, gear transmission mechanisms,
and controllers. Link Modules of varying length connect the joints to each other. The
end-effector module consists of the tools required to interact with the robot environment.
In this research, new architectures for the Mechanical, Electrical, and Control of MRRs is proposed. The new design improves the robustness and flexibility of the manipulator and decreases the reconfiguration time considerably.
I was engaged in the whole design and implementation process of the MRR project from concept design to the prototype validation.